CHINESE INDUSTRIAL MACHINERY ASSOCIATION
台朔重工自動化處
本論文結合輕負載穿梭車(Light Loading Shuttle)與升降機 (Lifter),透過多層設置輕負載穿梭車並搭配升降機之整合,及穿梭車本身於料架中存取數量之優勢,提供物流貯存系統另一新形式之自動化倉儲系統。自動倉儲為物流系統之一環,依產業類別而有不同形式之倉儲。自動倉儲主要架構組成為:儲存料架、自動存取機及周邊出入庫設備。穿梭車為半自動倉儲之出入庫設備,擁有單一儲格內能置放較傳統自動倉儲較多的棧板(貨物)之優點,及能以多台穿梭車於同一巷道進行搬運進而達到高出入庫頻率。本論文提出一結合輸送機、升降機與穿梭車,同時進行存取之自動倉儲暨輕負載穿梭車系統,包括存取流程與軟體控制架構。穿梭子車本體控制系統使用可程式邏輯控制器(Programmable Logical Controller, PLC),再配合升降機(Lifter)及上位電腦(Host PC),架構輕負載多層式穿梭車控制系統。此外,穿梭子車本身有安裝安全防護裝置-障礙物檢測感測器。
關鍵詞:穿梭車、自動倉儲、可程式邏輯控制器
自動倉儲系統 (Automatic Storage and Retrieval System, AS/RS)為無人化自動控制之立體倉儲系統。典型的自動倉儲系統包含多個巷道(Aisle)及巷道兩側高架式儲存料架(Storage racks),每條巷道內各由一台自動存取機負責執行物料入庫及出庫之存取作業。巷道前設置物料搬運系統,負責入出庫站與存取車間之物料運搬作業[1] 。自動存取機亦可說是取代人員操作之堆高機,於倉庫中進行貨物之存取工作。
自動存取機的貨物主要分別為存放於棧板上或是塑膠箱中,其中,對塑膠箱式自動存取機而言,為求高頻率出入庫,需提高整體(走行、升降及叉牙)之速度。此外,為使儲量增加,整體巷道高度與寬度得隨之調整。
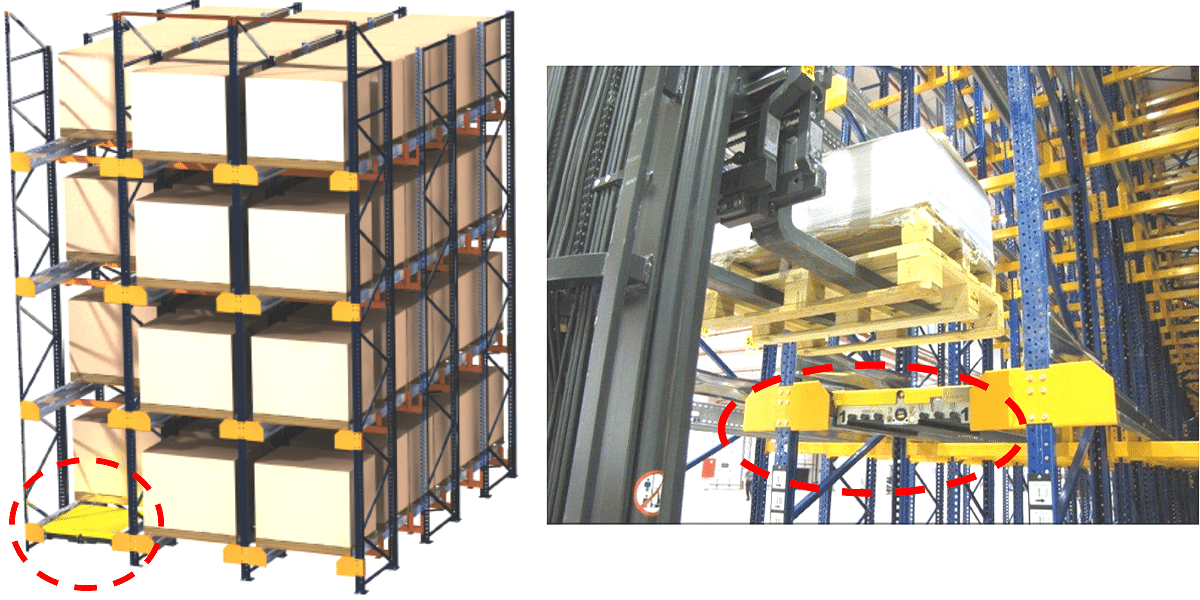
一般棧板型穿梭車目前多應用於傳統倉儲,由人員駕駛堆高機將其插取放置於有軌道之料架上,再將貨物存放至料架,人工遙控令穿梭車將貨物移入、置放,如圖 1 所示為棧板型穿梭車應用示意;相對地,在完成置放穿梭車在料架上,人工遙控令穿梭車將貨物移出後,再由堆高機將貨物移出。
一般棧板型穿梭車之料架最大的優點是,單一倉儲內能置放較傳統自動倉儲較多的棧板(貨物),今本處提出一有別棧板式穿梭車與塑膠箱式自動存取機之輕負載穿梭車系統。
本輕負載多層式穿梭車系統為:① 結合穿梭車、升降機及輸送機 ② 負載(貨物)有別一般棧板,為塑膠箱(620X430X315, mm) ③ 節省空間,縮短巷道高度與寬度,並透過整合多部輕負載穿梭車於料架中進而達到高出入庫頻率等優勢。
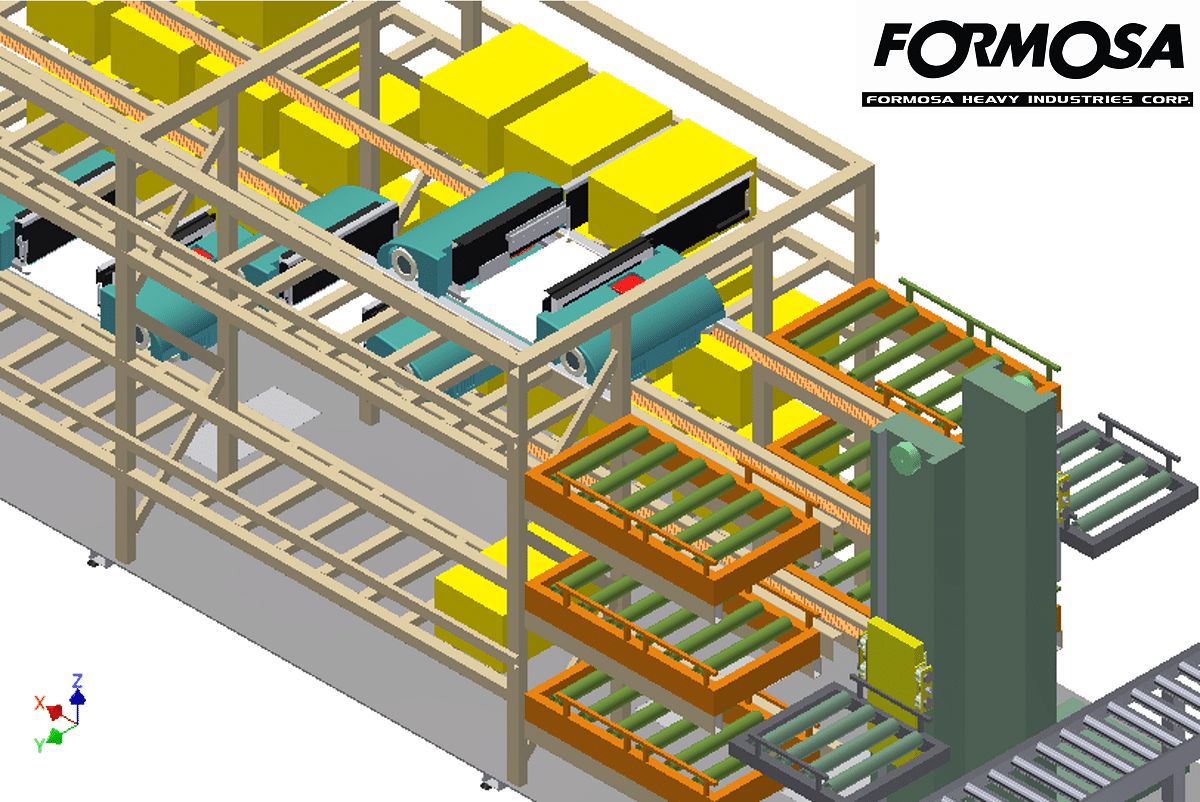
如圖 2 所示為本處所開發製作之輕負載多層式穿梭車運用示意圖。輕負載多層式穿梭車系統可應用於產業別如:食品飲料、化工、物流及醫藥產業,承襲本處於自動化物流工程經驗,以豐富產品線開發新設備。
在安全裝置方面,有安裝障礙物檢測之感測器,感測距離能達到30m且具備廣角功能,因此能夠達到大範圍之障礙物感測,在感測到障礙物後能快速停止避免碰撞,並可針對不同距離來做設定,障礙物檢測感測器如圖 3 所示。
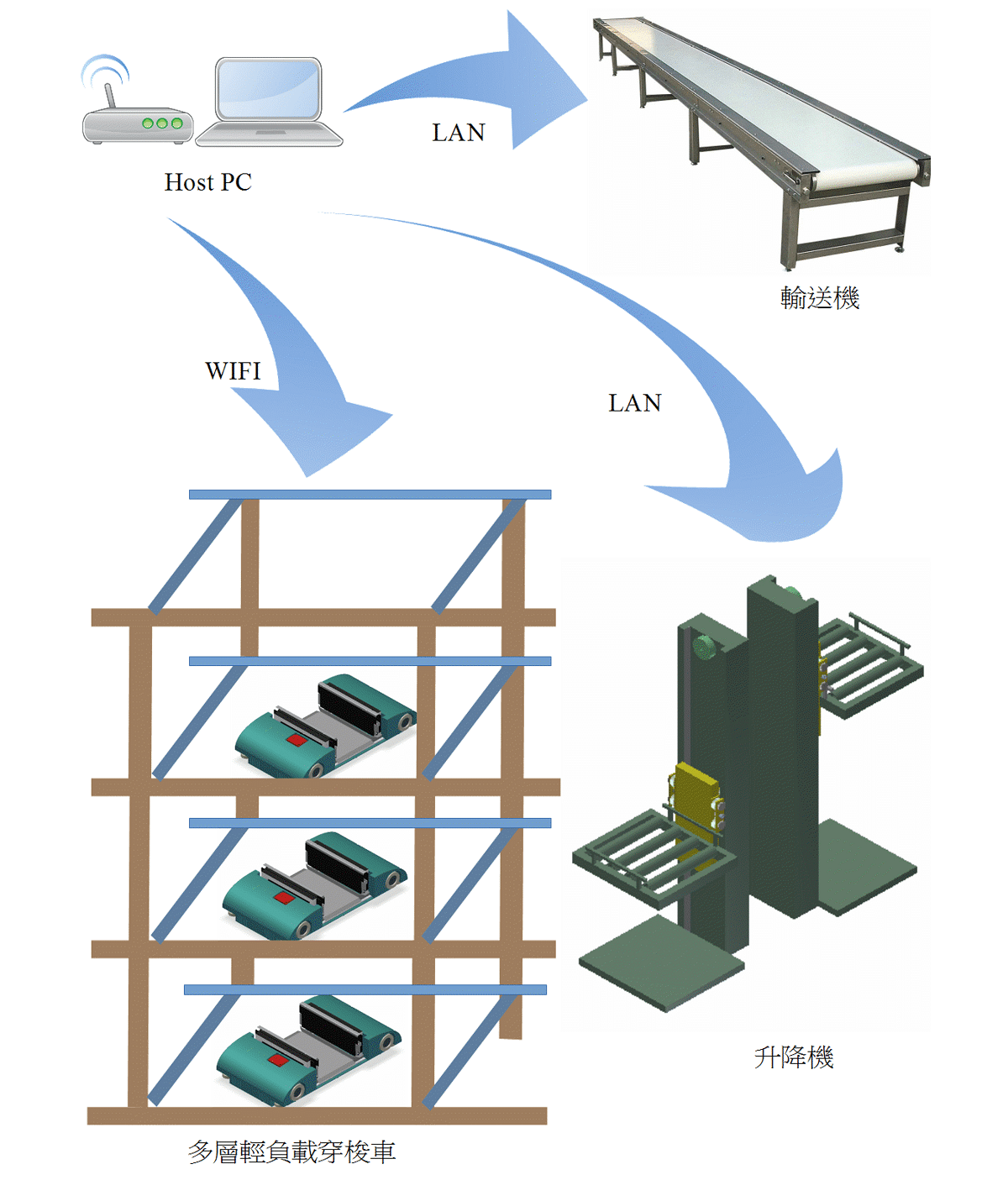
為整合穿梭車與升降機,需透過上位電腦(Host PC)進行控制與整合。各層穿梭車與上位電腦之通訊硬體界面使用無線通訊模式,其優點是不需如自動存取機使用光通訊(ODT),節省空間。穿梭子車本體控制架構,採用可程式邏輯控制器(PLC)做為各層穿梭車之控制器,並以條碼定位系統(Barcode Positioning System, BPS)作為定位控制用。
如圖 4 所示為輕負載多層穿梭車控制系統之主架構示意圖。其中上位電腦之功能說明如下:
(1) 對升降機控制:下達貨物運搬命令、單筆取/置物命令、擷取升降機狀態資訊。
(2) 對穿梭車控制:下達出入庫運搬、擷取穿梭車狀態資訊。
(3) 對周邊設備控制:下達貨物移動命令與貨物資料收受。
(4) 運搬資料控制與派令:
(a)資料追蹤-為運搬資料追蹤監控資料狀態。
(b)維護-為運搬資料維護(包含人員登入、修改和刪除)。
(c)透由Host整合資料流、資料庫與各設備控制程式,達成有效存儲與物流控管。
穿梭車是以直結式兩輪傳動的方式進行移動,走行輪由PU包膠組成。以下為就穿梭車之「搬運取卸載、工作模式、穿梭車供電機制及系統通訊」說明。
【 搬運取卸載 】
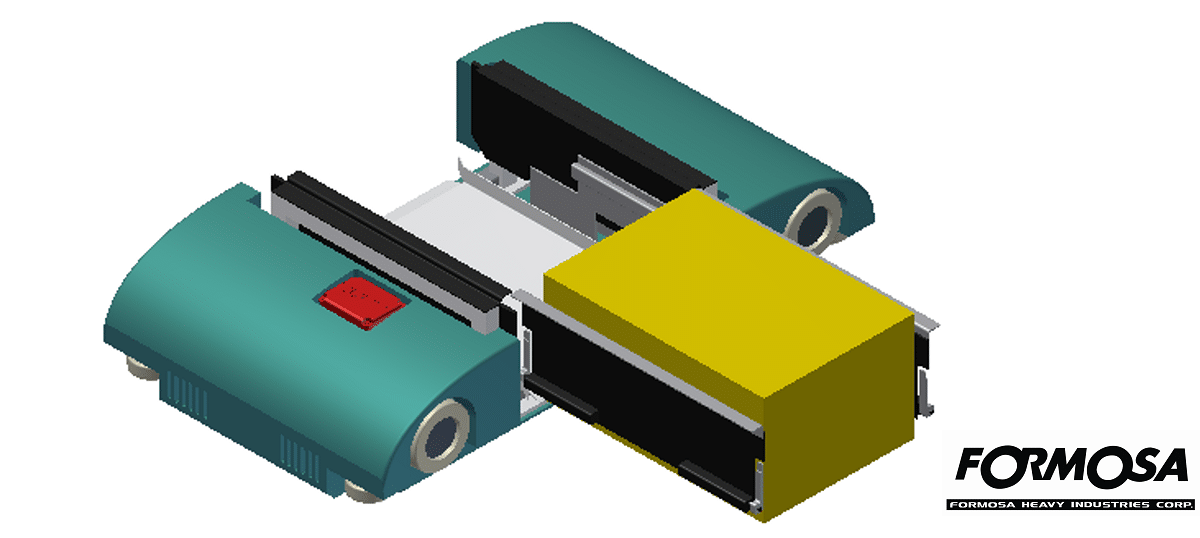
穿梭車接獲上位電腦派令,依派令進行取/置物,並對依規劃之塑膠箱位置進行存取。在本論文中,穿梭車叉牙是以推拉式存取機構來進行貨物存取,如圖 5 所示。
【 工作模式 】
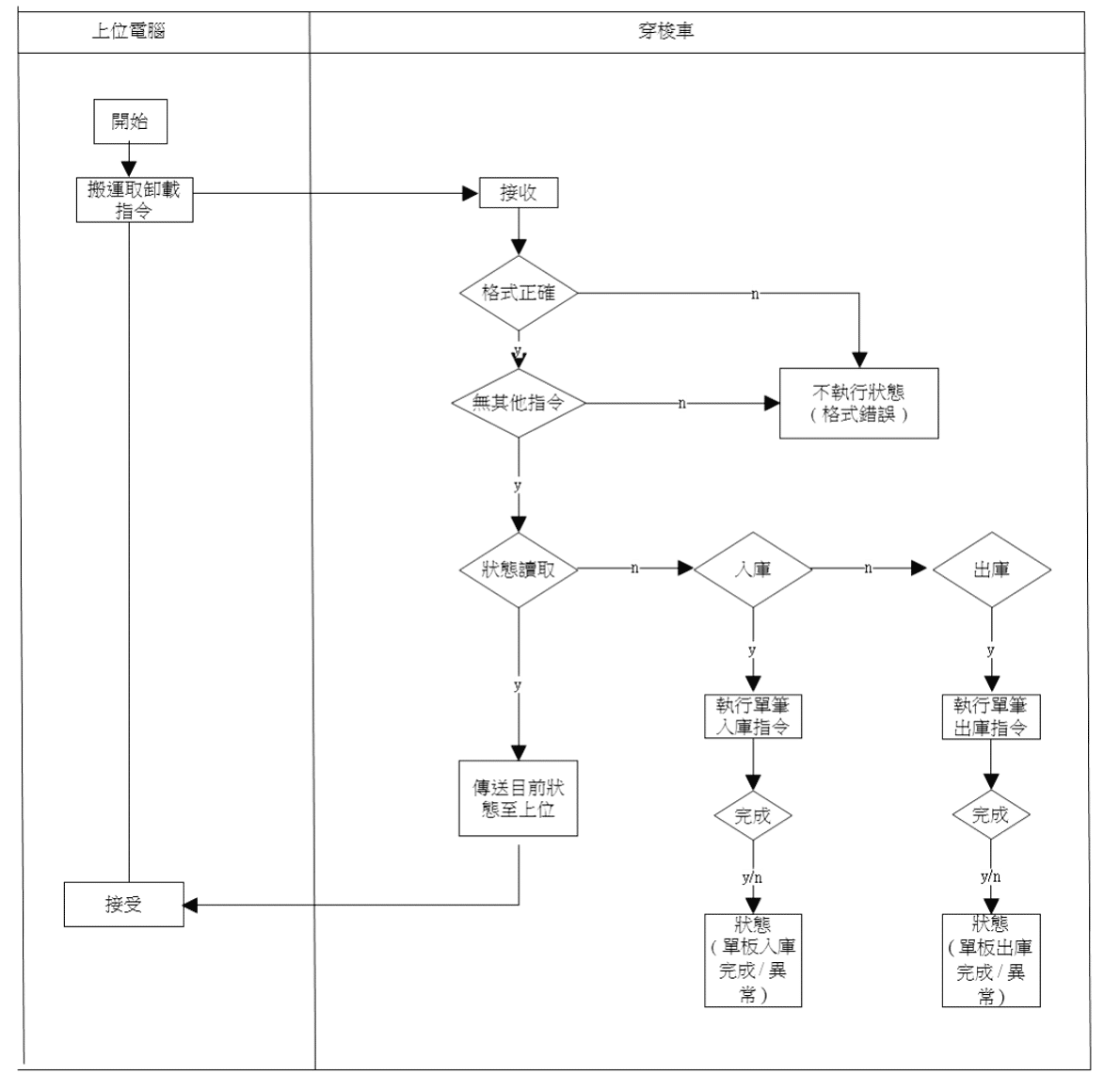
穿梭車工作模式主要為:接受上位派令,至目的棚位進行存取。如圖 6 所示為穿梭車接受上位電腦派令之程式流程。
【 穿梭車供電機制 】
當穿梭車在軌道上移動時,透過集電軌維持供電,與棧板型穿梭車比較下,不需考慮穿梭車電池續航力及設計如何充電等問題,如表 1 所示。
【 系統通訊 】
上位電腦與穿梭車是透過無線通訊進行資料交換,穿梭子車接受上位電腦派令。上位電腦以輪詢方式,對需要輸入派令或擷取訊息之穿梭車進行交訊動作。
透過整合升降機與輕負載穿梭車,自動倉儲系統之運用可更加廣泛,其中穿梭車系統與一般自動倉儲系統比較之優點:
(1) 增加自動倉儲料架使用空間。
(2) 系統出入庫頻率可彈性運用。當愈多部車同時工作,運搬頻率即可增加。
(3) 透由升降機與穿梭車的搭配,可以更容易達到高出入庫頻率與存取效率,同時節省使用空間。
[1].朱明彰,( 2005 ), 「基於代理人群己架構之通式化巷道多車AS/RS執行管控系統設計」,頁i。
延伸閱讀:高效率氫氧化鎂脫硫系統實現近零排放的優化技術